


ROBOSENSE II
Research
Collaborator: Andrew Moorman, Bennet Norman, Jingyao Ren
Robotic fabrication in architecture increasingly demands multi-robot collaboration. However, existing industrial robotic programming systems are often closed, proprietary, and designed for stand-alone use, limiting adaptability and integration. This paper introduces RoboSense 2.0, an open system designed to empower architects by enabling easy integration of sensors and actuators for dynamic fabrication, allowing robots to perceive and interact with the built environment.
The core of RoboSense 2.0 is based on ROS (Robot Operating System), an open-source framework that provides tools, libraries, and conventions for a wide range of robotic platforms. By utilizing ROS as the foundational software, we can construct complex robotic systems composed of multiple nodes, each representing components such as motors, sensors, or algorithms. Our aim is to make these ROS technologies accessible to architects with limited robotics expertise, facilitating innovative robotic collaboration to address complex fabrication challenges.
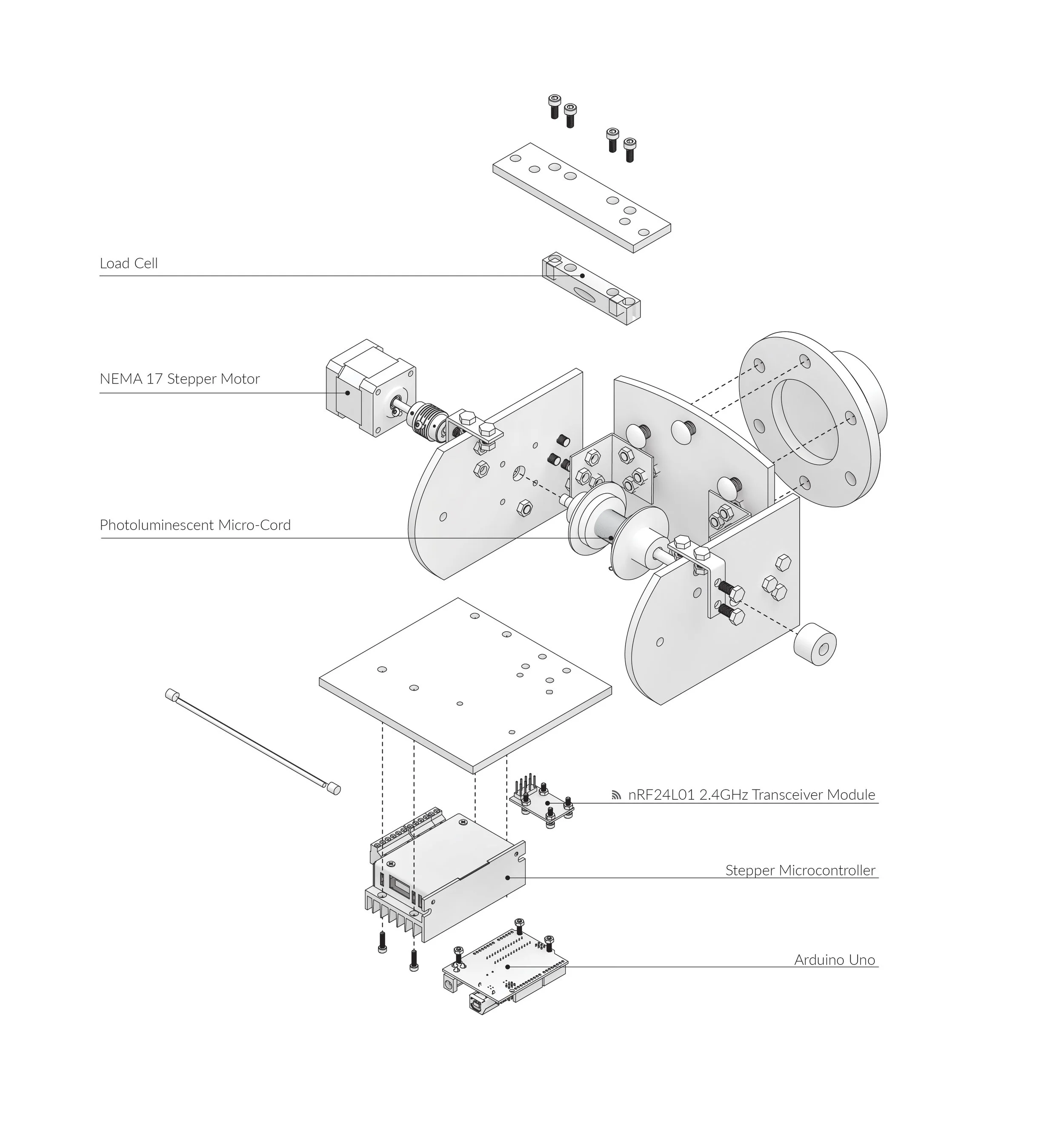
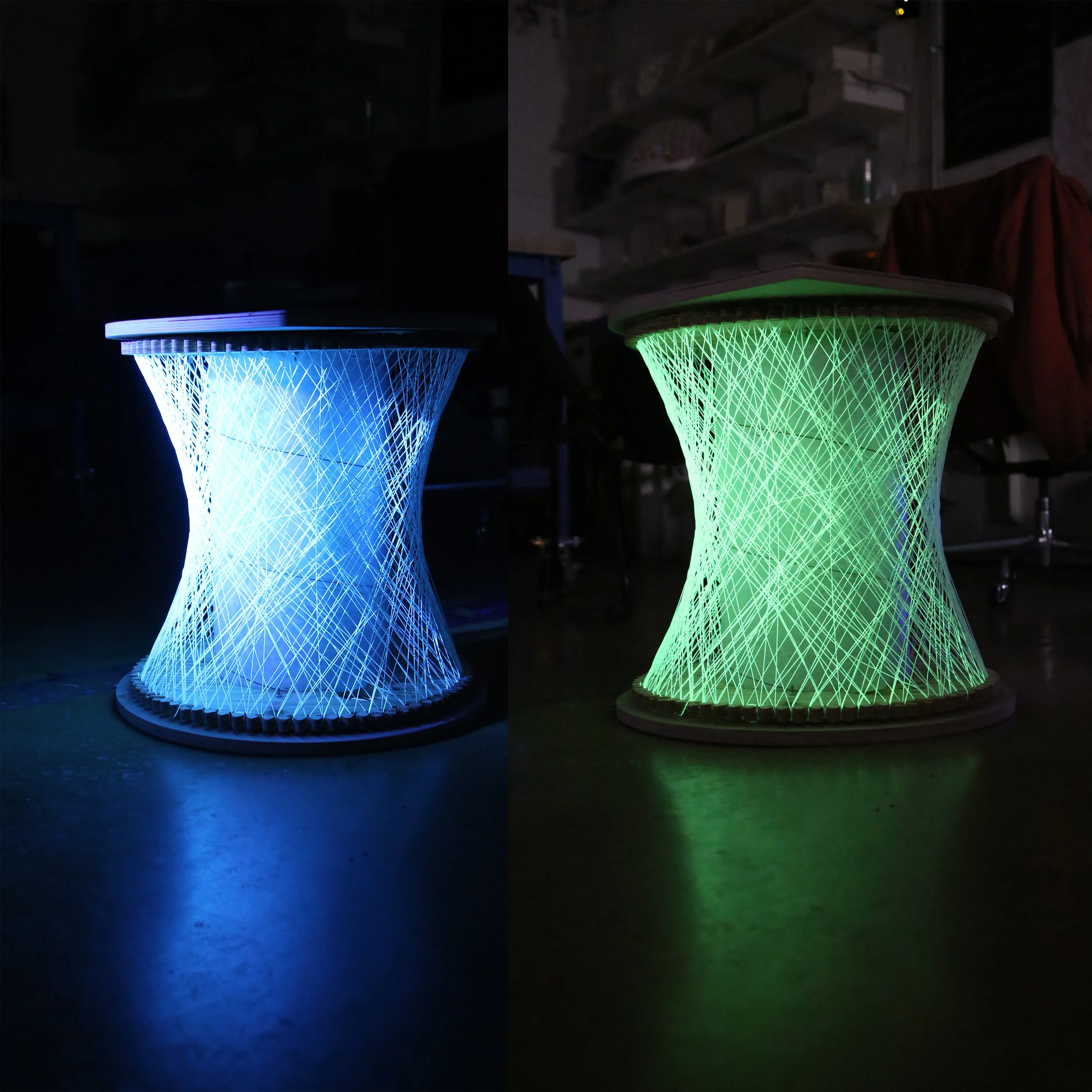
The first application of RoboSense 2.0 is in the robotic fabrication of fiber-wrapped stools for the MoMA PS1 YAP 2017 project, Lumen, by Jenny Sabin Studio. For this project, 100 recycled spools, each approximately two feet tall and two feet wide, were collected. CNC milling was employed to cut grooves into the edges of the spools, providing channels for photo-luminescent micro-cord to be wrapped. RoboSense 2.0’s integration of actuators and sensors controls the density and tension of the cord as it is wrapped around the spools, ensuring precision in the fabrication process.
We developed a ROS-based wireless network that facilitates seamless feedback between sensing, analysis, design, and fabrication. The system includes a custom end-effector equipped with tension sensing and control mechanisms, attached to an ABB IRB 4600 industrial robot, and supported by a software suite featuring an inverse kinematic solver, robotic manipulation simulation, and toolpath generation. This system demonstrates the potential of open-source robotic frameworks to transform architectural fabrication by enabling creative, real-time, sensor-driven interventions.