Construction ROBOTICS

The research aims to develop construction processes that leverage the precision, scalability, and flexibility of robotics to address the global challenges of resource scarcity, labor shortages, and environmental impact. We envision a construction industry where humans and robots work side by side in a symbiotic relationship. Robots will take on dangerous, physically demanding tasks, ensuring safer work environments, while skilled workers will oversee, guide, and collaborate with intelligent systems, elevating the profession and enabling greater precision and efficiency. Driven by the vision, studies have been done to address the technical challenges in localization, site mapping, and the development of task-specific interfaces that facilitate effective human-robot collaboration.
Proxemic-aware Augmented Reality For Human-Robot Interaction
The IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN 2023)
Jingyang Liu, Hongyu Mao, Joshua Bard
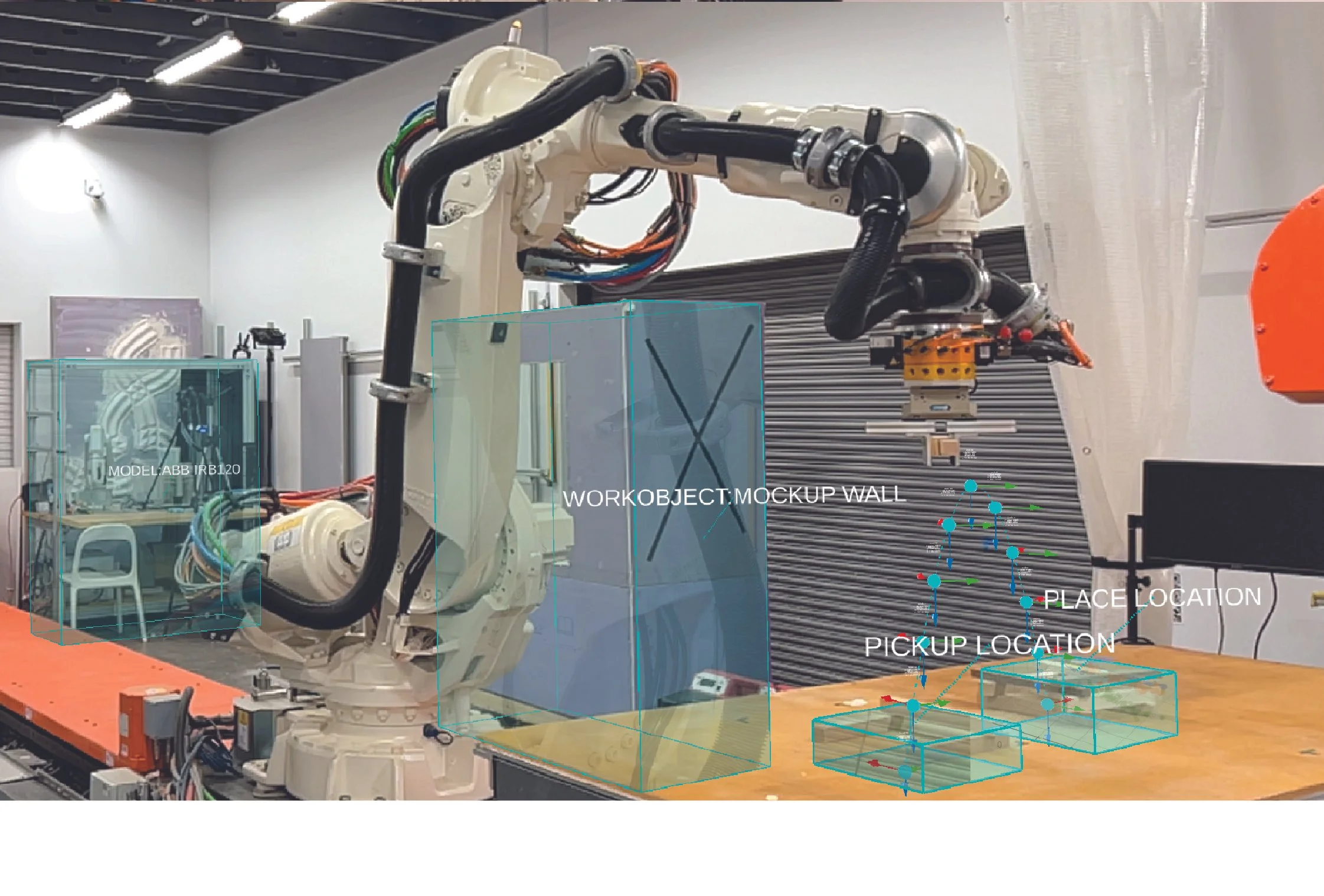
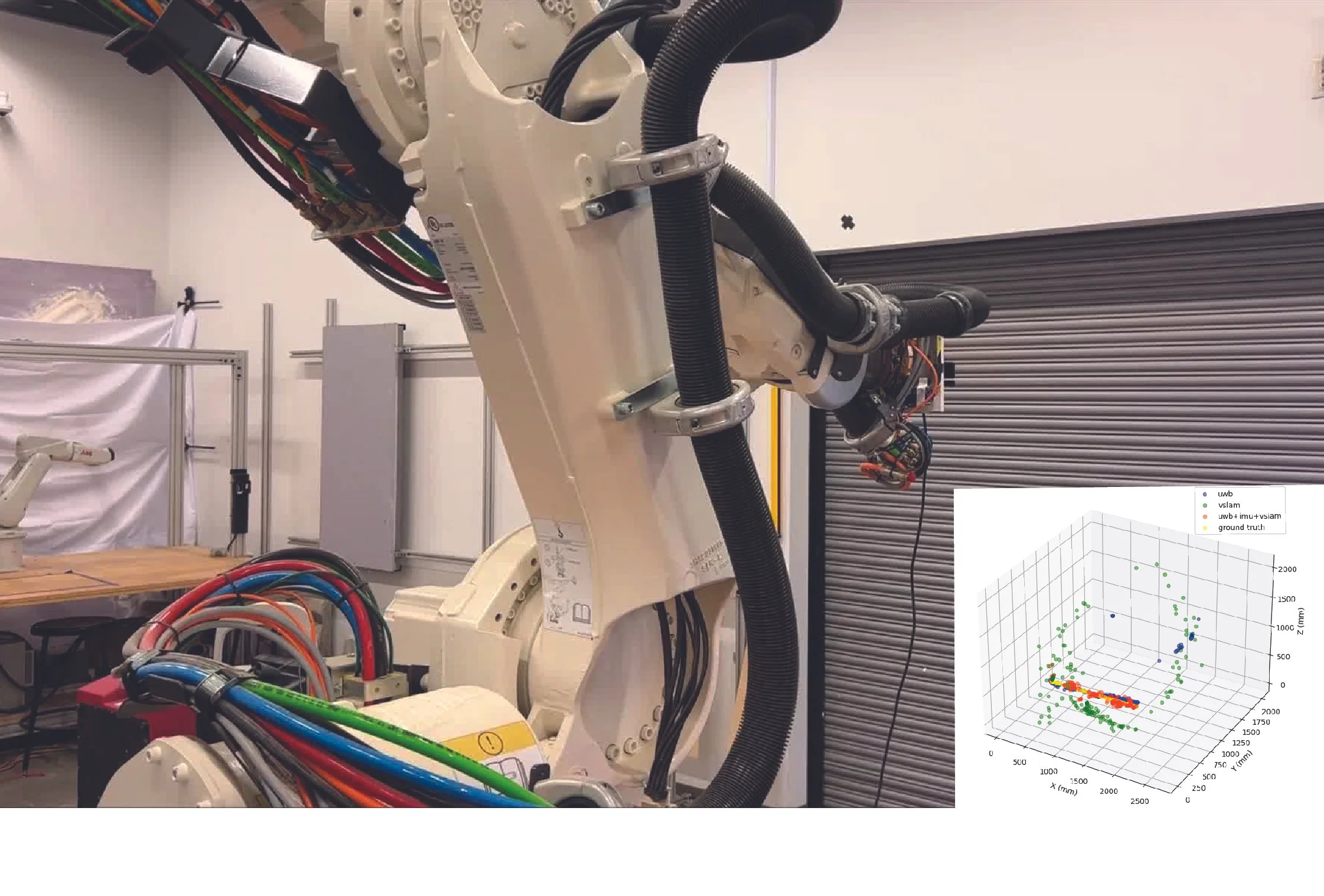
Robust Visual SLAM with Integrated UWB Positioning for Construction Robotics
International Conference on Robotics and Automation (ICRA 2023) 2nd Future of Construction Workshop (Best Research Paper)
Jingyang Liu, Linxiaoyi Wan, and Joshua Bard
A Computational Framework For Robotic Quality Assessment and Management In Construction
International Conference on Robotics and Automation (ICRA 2022) 1st Future of Construction Workshop (Best Research Paper)
Jingyang Liu, Yumeng Zhuang, and Joshua Bard
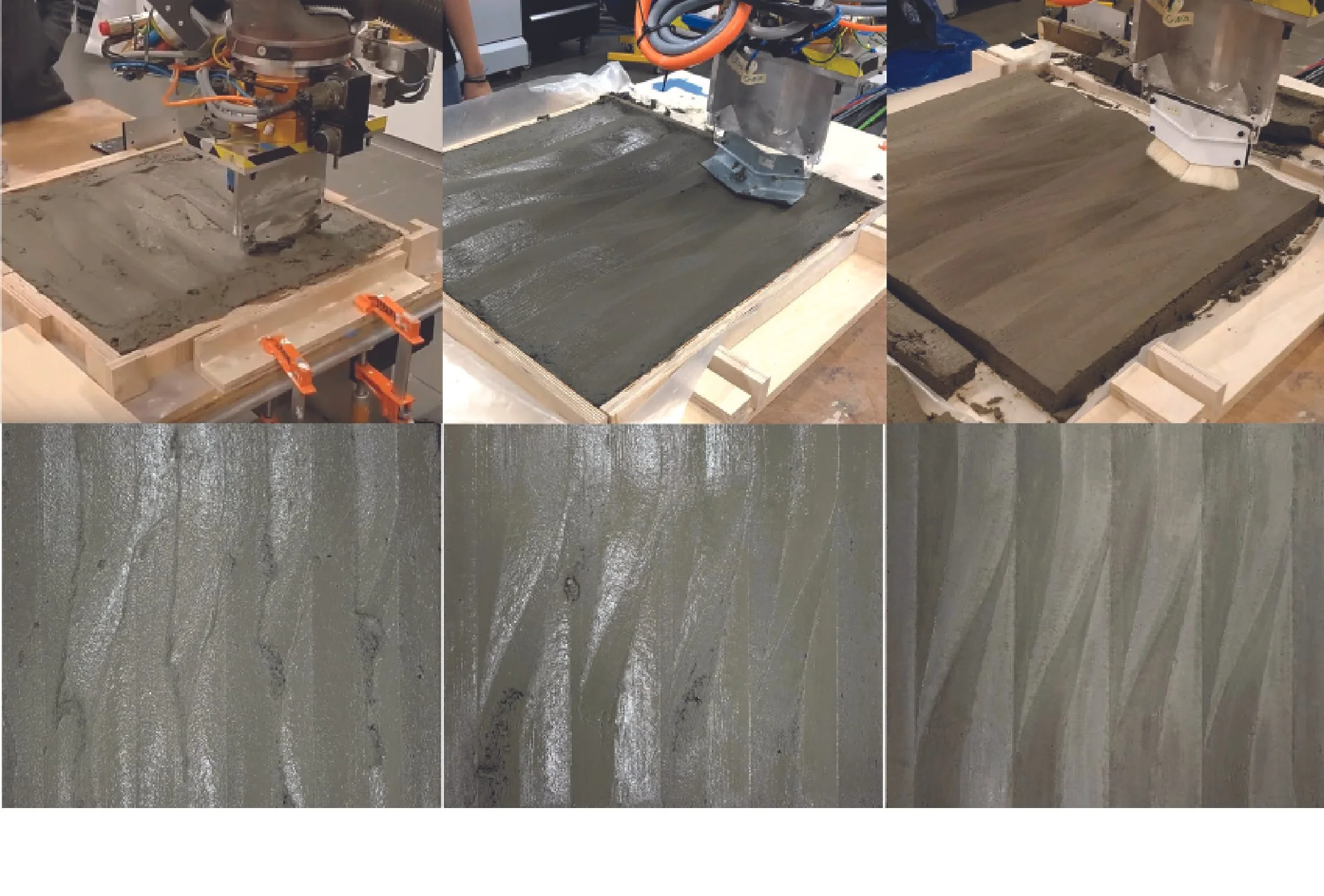
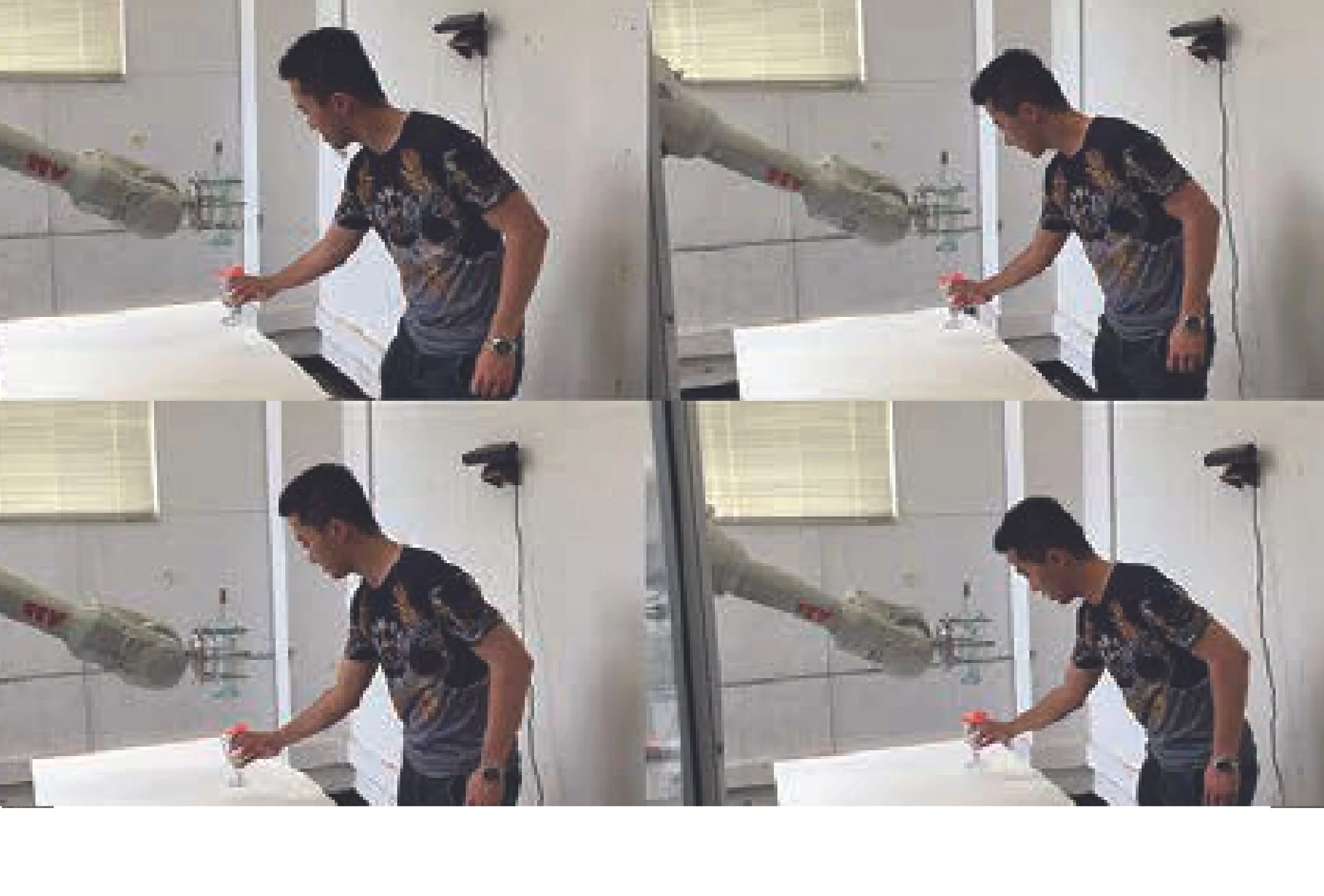
Material Characterization of Workability and Process Imaging for Robotic Concrete Finishing
Construction Robtics
Jingyang Liu, Yi‑chin Lee, and Joshua Bard
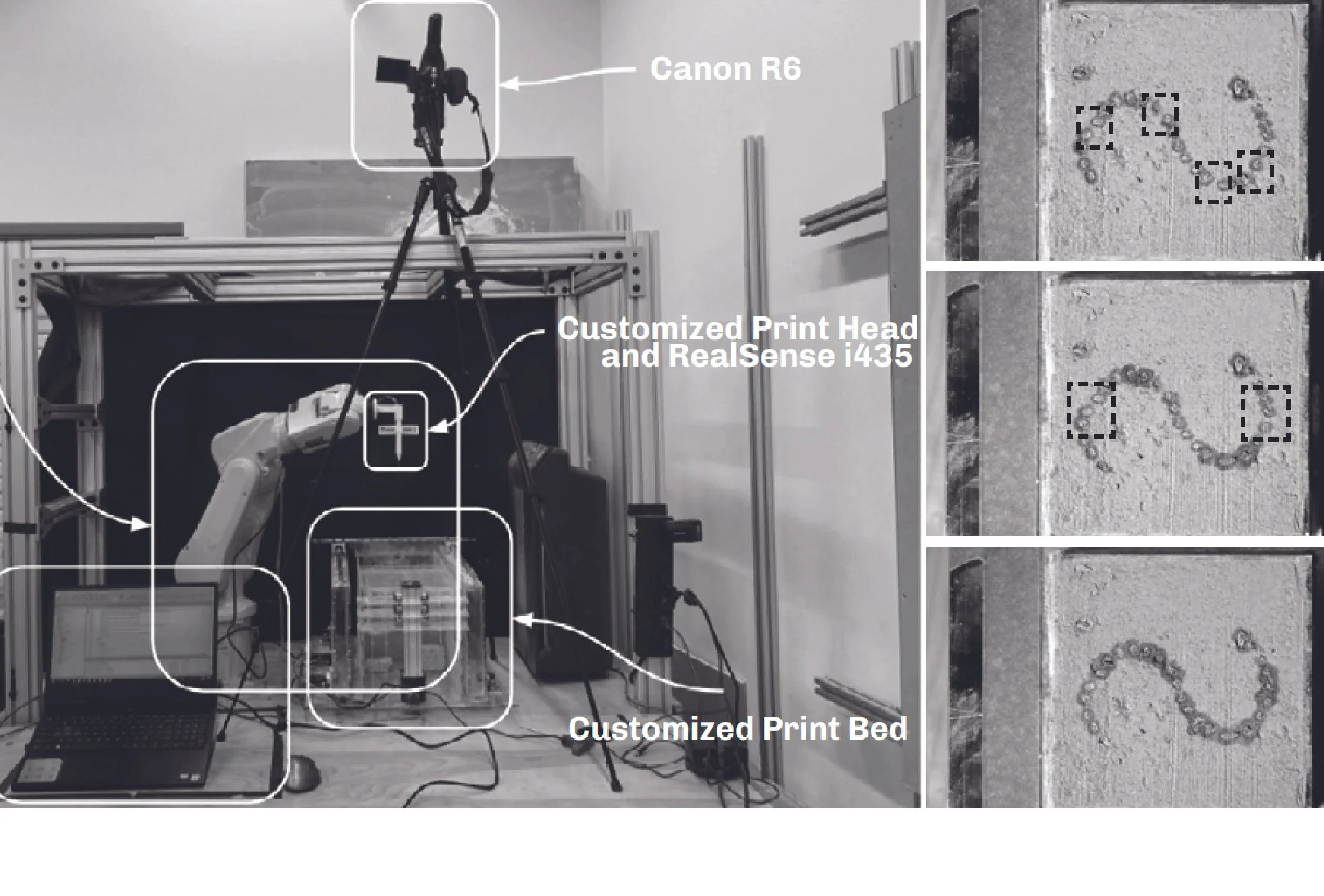
Image-based Monitoring for Binder Jet 3D Printing of Coarse Composite Concrete Powders
In ACADIA 2023: Proceedings of the 43rd Annual Conference of the Association for Computer-Aided Design in Architecture
Linxiaoyi Wan, Jingyang Liu, Joshua Bard, and Dana Cupkova
RoboSense: Context-Dependent Robotic Design Protocols and Tools
In ACADIA 2016: Proceedings of the 36th Annual Conference of the Association for Computer-Aided Design in Architecture
Andrew Moorman, Jingyang Liu, and Jenny E. Sabin
Computational Design

The research seeks to leverage algorithms, data, and computational tools to create more responsive, adaptive, and sustainable solutions in architecture, design, and beyond. By exploring the potential of generative systems, works in this section aim to develop design processes that not only optimize for efficiency and performance but also unlock new realms of aesthetic expression, material innovation, and interdisciplinary collaboration workflow.Computational and generative design will empower designers to solve complex challenges, enabling them to explore vast design spaces that are otherwise unattainable through manual methods. This approach will democratize access to sophisticated design tools, making novel technology available to a broader range of practitioners and building a new paradigm of creativity, sustainability, and human-centric design.
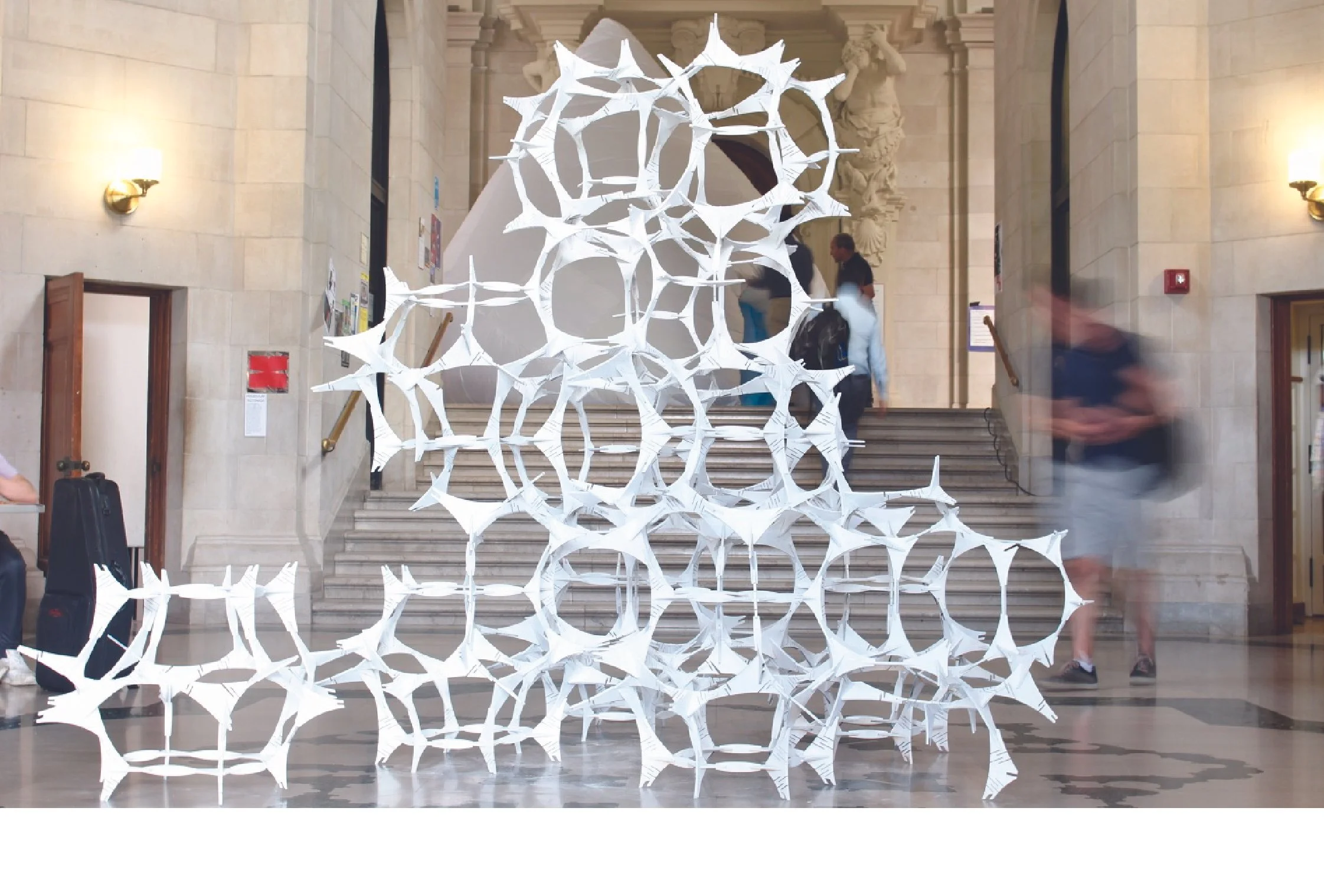
Computational Design and Fabrication of Highly Customizable Architectural Space Frames
International Journal of Architectural Computing 19, no. 1 (2021): 37-49.
Jingyang Liu, Yi-Chin Lee, and Daniel Cardoso Llach
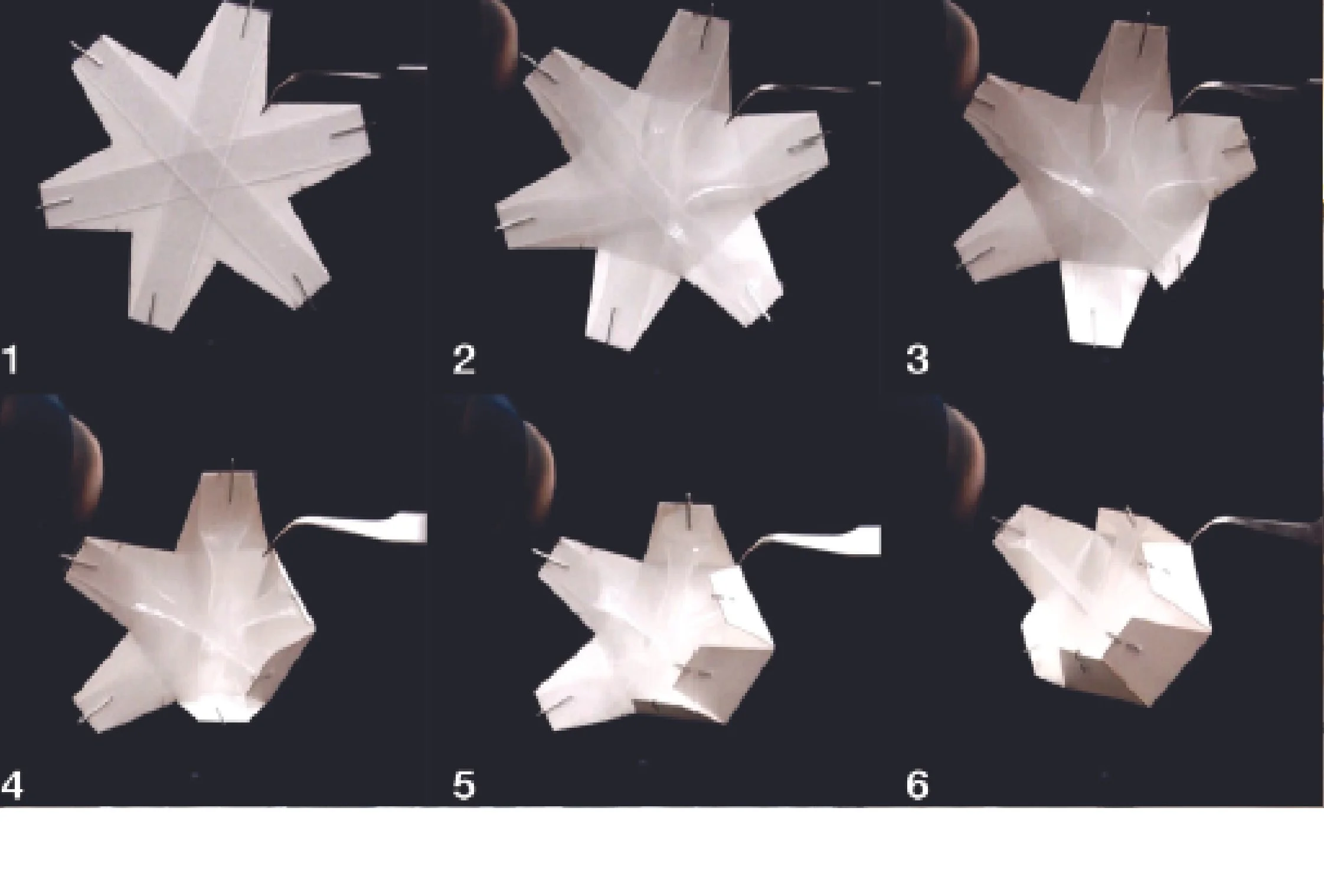
Programmable Kirigami
IDETC-CIE, American Society of Mechanical Engineers, 2019.
Jingyang Liu, Grace Chuang, Hun Chun Sang, Jenny E. Sabin
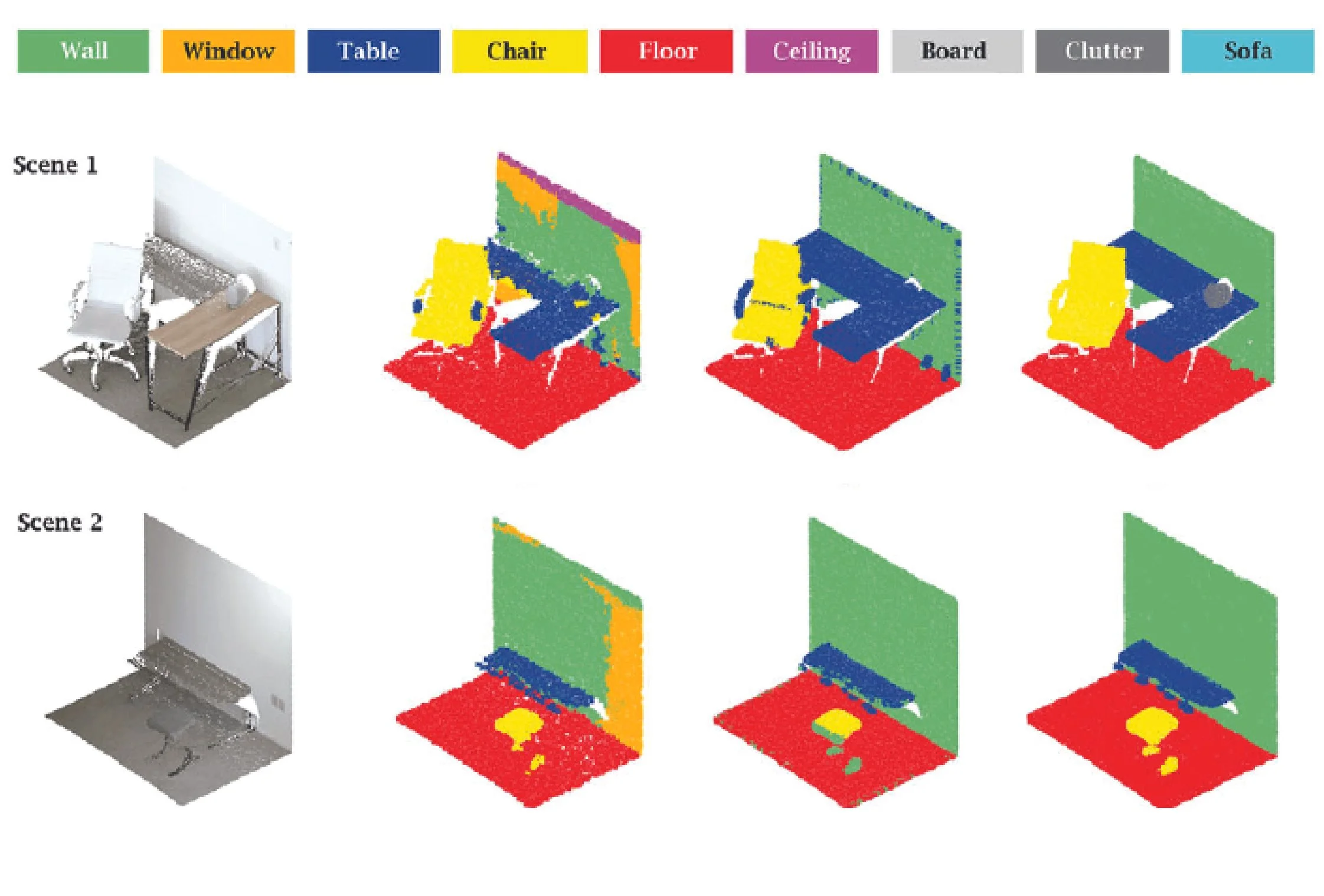
A Semantic-Based Approach to Digital Content Placement for Immersive Environments
The Visual Computer 39, no. 12 (2023)
Jingyang Liu, Yunzhi Li, Mayank Goel
Lumen
In ACADIA 2018: Proceedings of the 38th Annual Conference of the Association for Computer-Aided Design in Architecture
Jenny E. Sabin, Dillon Pranger, Clayton Binkley, Kristen Strobel, and Jingyang Liu