










kirigami matrices
Category: Research
Collaborator: Madeleine Egges, Jasmine Liu, Ben Norman
This research investigates the potential of kirigami geometry—characterized by folding with strategically placed cuts —through simulations and the development of kinetic and adaptive architectural assemblies. Traditional kinetic assemblies typically rely on rigid components connected by mechanical joints, which offer limited ranges of motion and often necessitate mechatronic actuation. While mechanical motion is effective for certain applications, such systems lack the adaptive capacity, elasticity, and embedded intelligence of more dynamic structures.
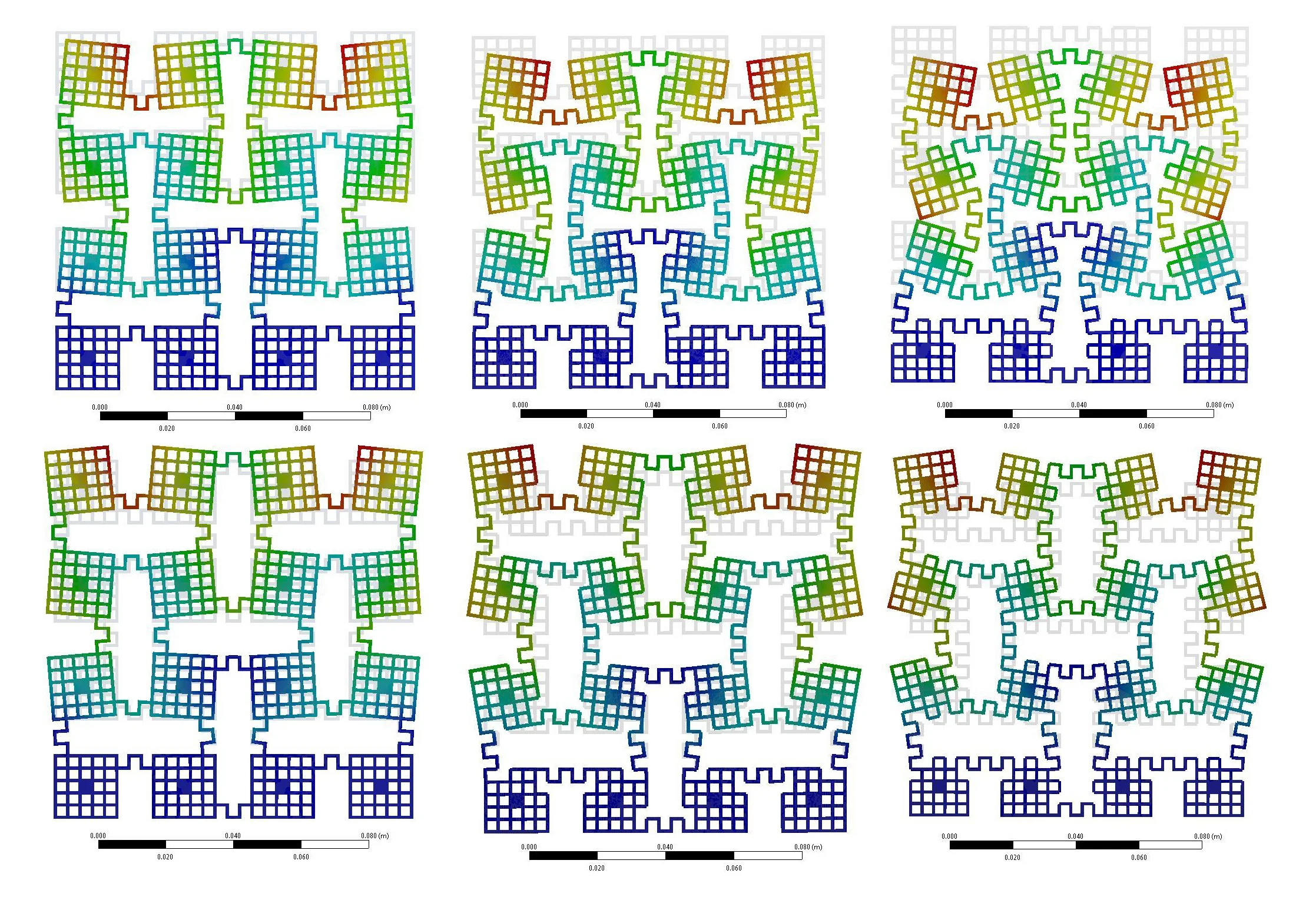
In contrast, this research proposes the design of flexible matrices to move away from rigid, mechanically actuated systems toward pliable, continuous 2D and 3D structures capable of elastic deformation in response to external stimuli, without relying on external energy inputs for actuation. As a proof of concept, we developed an integrated panel-and-hinge assembly, where the panels and hinges are not separate, mechanically connected components, but rather functional zones within a continuous matrix. By precisely controlling the characteristics of the individual units—such as panel size, hinge geometry, spacing, and unit shape—it is possible to induce large-scale, adaptive behavioral changes in the overall structure. This approach introduces a new paradigm for adaptive architectural systems, characterized by embedded flexibility and responsiveness.